Navmesh原理
参考
NavMesh是一个对基于导航网格寻路体系的统称(A*指代的是某一种寻路算法)
- 基于凸多边形网格的寻路体系
- 分为 导航网格构建,寻路算法 两个部分
导航网格构建
方式
- 多边形裁剪
- 多边形裁剪是直接对地形的多边形网格数据进行裁剪及合并,从而生成导航网格
- havok引擎
- 体素化
- 体素化是对地形多边形网格进行栅格化,然后用这些“格子”重新生成导航网格
- Recast(UE4,Unity)
- 多边形裁剪
UE4使用开源的recast其包括两个过程:Recast和Detour
- Recast:将场景网格模型生成用于寻路的导航网格
- Detour:利用导航网格进行寻路
Recast流程
- 创建体素模型,把模型分割成简单的区域,把这些区域再分割成简单多边形(凸的)
- 1.通过把输入的三角形mesh进行光栅化,形成一个多层的高度场,就能得到体素模型。之后可以对体素模型做一些简单的过滤,去掉玩家不可达的位置
- 2.体素模型描述的可行走区域被划分为重叠的2D区域,这些区域只有一个未重叠的等高线,这可以大大简化最后一步处理步骤
- 3.首先沿着边界划这些区域并进行化简可以剥离出导航多边形。然后把这些导航多边形处理为凸多边形,凸多边形可以更好的用于寻路和对场景进行空间推理。
高度场
实心高度场
开放高度场
处理过程
Voxelization( Create a solid heightfield from the source geometry)
Generate Regions(Detect the top surface area of the solid heightfield and divide it up into regions of contiguous spans.)
Generate Contours ( Detect the contours of the regions and form them into simple polygons.)
Generate Polygon Mesh( Sub-divide the contours into convex polygons.)
Generate Detailed Mesh(Triangulate the polygon mesh and add height detail.)
寻路算法
- 经过导航网格构建后的游戏场景,大致可以抽象成下面这样
黑色是不可通过的地块,黄点是每个地块的中心点,黄线是将每个可通过地块的中心点进行了连接
连接条件是:如果两个可通过地块有邻边,则连接
![]()
寻路情况
- 1.两个点在同一个地块内,走直线;
- 2.其中一个点不在合法地块内,此路不通;
- 3.两个点在不同地块,需要寻路。
A*
- A算法详见:[A](https://sanctorum003.github.io/2021/06/03/Algorithm/A_Star/)
对于情况3,一个简单的寻路算法就是A*算法
- 其中,
f(n)是节点n的综合优先级。当我们选择下一个要遍历的节点时,我们总会选取综合优先级最高(值最小)的节点。 - 其中,
g(n)就是在Djikstra算法中计算的离起始点的距离,我们在Djikstra中取g(n)值最小的作为最高优先级 - 其中,
h(n)为A*算法的启发函数,计算节点n距离终点的预计代价(距离).取h(n)值最小的作为最高优先级
- 对于在navmesh中,g(n)的计算可以通过每两个可通行块之间的连线(即图中黄线)来作为边
- h(n)可以简单的用当前黄点与目标点直接连线
- 其中,
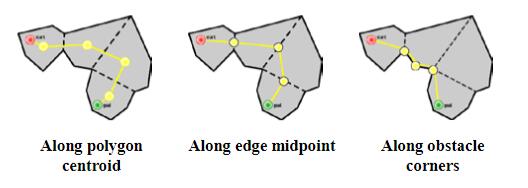
行走优化(多边形网格)
- 左一连接每个块的中心点
- 中间连接每个块最近边的中心点
- 右边沿着边走
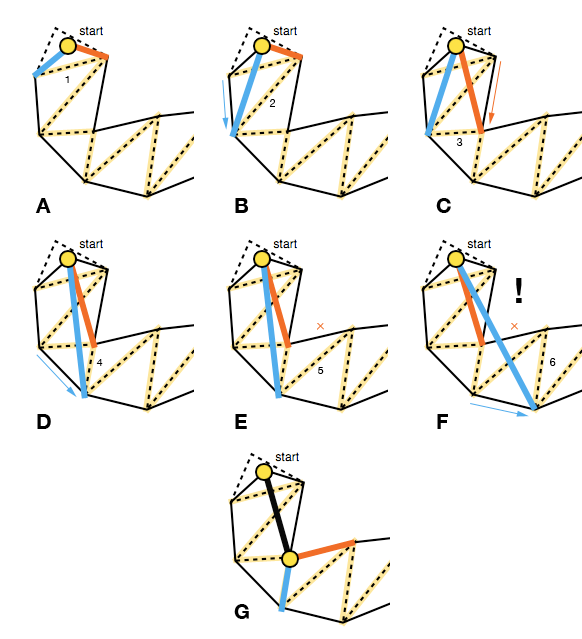
行走优化(三角网格) - 拉绳算法(漏斗算法)
- 规则:
- 尝试挪动其中一条线,当本次挪动使夹角变小,则合法
- 两条线交替尝试挪动
- 若挪动将使夹角变大,则回退到挪动前的状态,并交换挪动权
- 若挪动使夹角变负,则合并路线,并从结果处重新开始
- 具体看Navigation Mesh (NavMesh) 原理讲解(二) 当地块都是三角形时的路径优化